 |
| Steady progress on the robot - mechanical, electrical, and software all have roles to play. |
Decisions, decisions. This week was all about building and realizing our robot in real life. How we got here came from a series of decisions (good and bad) through the past five weeks. Rather than me trying to draw out several paragraphs about "we carefully placed the center punch, engaged the spring, and created an indent in the aluminum that we could reference with our drill bit..." I'll go a bit more in depth on some of the decisions we made about this years robot and mechanisms. So, hop into something comfy, and let's get started! (Comfy clothes are a requirement for this blog post, mental sanity first!)
Everything I'm about to tell you is a lie. I start all FRC seasons with that statement, and I'm sure somewhere in the past it's been written in this blog. I definitely said I won't try to write multiple paragraphs about what we did last week, but I'll at least write one to sorta catch-all our progress. (Spoiler, it's more that one paragraph...) We carefully placed the center punch, engaged the spring, and created an indent - ok fine.
This is about the time in the season where our first burndown list gets written. The major pieces of the robot all come together very quickly, so it looks like tons of progress gets made in a short amount of time. Then everything gets flipped on its head, and the team works on the robot for hours, and at the end of the day it looks very similar to when you started...
 |
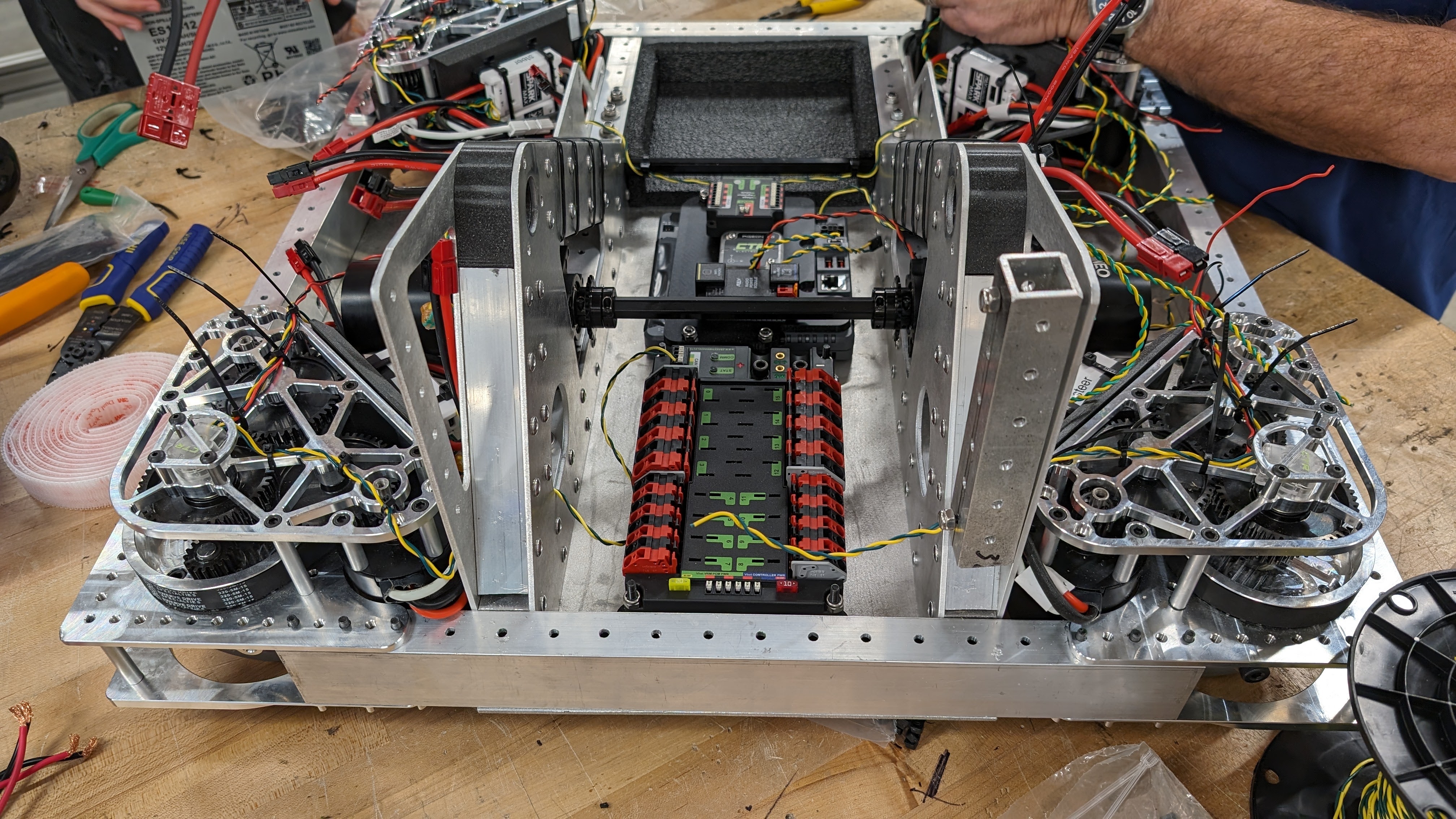
| The chassis doesn't look too different, but a lot of work happened with it. |
What was on our burndown list? Lots. We cut our bellypan on like, day 3 or 4 of build season. Part of that early homologation effort helped us make decisions fast and move forward quickly. Now, 6 weeks later, we need to rivet and bolt motors, cable tie-downs, stand-offs and other things onto the chassis. Once again we did use our tried and true method of printing 1:1 drawings, taping it to the chassis and frame rails, and getting our holes center-punched and drilled. At the start of one build meeting we had 32 holes to make (and then dry-fit the parts). It took 2 hours. Lots of progress, but very little visible at the end of it all. (It's also a really small robot, so we couldn't get more than two people effectively working on it at the same time.)
Funny story - while drilling holes on the robot, our Student Lead threw the robot on the ground. Good news - the robot can take a hit. The bad news - I'm not going to share any more context, cause I think leaving it at that is just plain amusing.
 |
| Should probably put some pillows in the robot cart for next time... |
With the arm together, we started looking at the next big subsystem - the climber. More tubes to cut! Yeah, now we're getting a bit more into the rinse and repeat process. Our software team used this time to start working with a CANdle, bringing some light to the robot for the cool factor, and to provide feedback from robot actions on the field. Flash green if you know what I mean. (Hey that rhymed!)
Design team is basically done and happy. Final climber review got wrapped up, so they are shifting to help build and assemble. More work will come once we get the robot running and start breaking things. Electrical team had quite a Saturday - with all the chassis modifications complete, we had everything basically together and mounted for 12 of our 15 motors in the belly of the bot. (Last year we had 7 motors. Total. I kinda miss last year...) Electrical was given the entire Saturday to cleanly and tidily wire the entire chassis. In record time we were able to grab a battery and perform our first bring-up of the robot. One minor issue with two isolated CAN nodes was fixed, but there was no smoke, and software got to start setting Id's and checking motor rotations for the shoulder and climber.
 |
| Climber in a box tubes. |
So, how did we get here and why do we do the things we do? Well, a long long time ago, in a galaxy far far away - Eh, I can tell that part of the story another day. This robot for 2024 is named Opportunity. I personally love the naming scheme we've been using. :-) Opportunity - Oppo for short - is (by our standards) a tiny robot with a swerve chassis, a double jointed arm, an intake with two pairs of rollers, and some climbers in a box to hang.
Chassis - We're 26" x 26". Day 1 we had a funny conversation about 27" vs 26" and our Student Lead (who also does electrical) basically said "Just do 26 and I'll hate myself later!" She has apologized many times for this throughout the season. (All in good spirit!) We chose a square chassis as swerve is still new to us and we wanted to make it easy on ourselves. Similarly we chose SDS modules because they are local and we can get a ton of support if we do have issues! The size does help with manueverability, but more specifically, being able to climb with other robots. Small frame takes up less space on the chain, so there's more room for friends.
Intake - We intake over the bumper. We really didn't talk to much about under bumper, but our main concerns involved not getting stuck on Notes if we had a gap they could fit through, and being nice and obvious rules-wise that 'hey we're not herding or shuffling or manipulating multiple game pieces. We just got this one here in our intake. La dee da.' And it keeps the bumpers nice and simple to make, no odd sizing or sloping or etc.
 |
| V6 intake/launcher ready for testing - more updates next week! |
Launcher - This has been a slightly painful item to test this year for many reasons previously relayed. Our main goal with integrating the intake and launcher was to avoid a hand-off somewhere in the robot. These game pieces are pretty awkward, and all season long we've seen some interesting pictures on Open Alliance blogs about all the weird creases and crevises these Notes find their way into. Our plan and goal is to use indexed shots from the Subwoofer due to simplicity. We're doing Swerve this year which is eating up our software resources, adding vision and variable distance trajectories would simply be too much. If we can easily score from a fixed position, that will work for us!
Arm - Stupid Amp. Ok, maybe not so stupid, this game is really interesting and challenging given the different scoring mechanisms of Speaker, Amp, and Trap. Our arm exists for one purpose and one purpose only - control when scoring in the Amp. In our early prototyping and design, we concluded that the most effective way for us to score in the Amp is from above, releasing down. This was a design heavy task, software light task - somewhat/slightly better matching the resources of our team. Early in the season we looked at Unqualified Quokkas, as their design was similar to what we were looking for. One conceptual change was adding a wrist so we can fold our intake within our frame perimeter while traversing the field. It is an added degree of freedom/complexity, but we feel this will increase our reliability by reducing the risk of damage.
 |
| The zip tie ends are effective at preventing pigeons from landing on our robot. 0 pigeons have landed on our robot this year, especially as we get our final wiring installed and tidied up. |
Climber - This was another super fun conversation on Kickoff Day. We got our prioritized list, and down in 6th or 7th was "drive everywhere - short bot". It was super low on the list, but our primary designer stated their intent of just making the thing short. We re-read through the list of all priorities above it (which did not include the Trap) and asked point blank: "Can you do this and keep it short?" "Yep!" No hesitation, just commitment. And we've delivered! The climber is short enough to allow us to drive everywhere, including under the Stage. The other side of the coin is a robot priority that we will be a good partner climber - we want to be able to climb with other robots on the same chain for Harmony. The small frame size is part of that, and having a climber that can reach the maximum height of the chain should allow us to hang with as many different robot friends as we can.
Hey friends - wanna hang with Oppo?
Quote of the Week:
Mentor 4: "I work better when its quiet."
Student 1: "I work better when I listen to Katy Perry."
Mentor 4: "I don't, cause then I'm listening to Katy Perry."
No comments:
Post a Comment